



Hallo Zusammen
Vor Weihnachten habe ich mich ja für eine Waggondrehscheibe auf dem Brückenmodul entschieden. Hintergrund – Ich will evtl. meine Fabrik noch in Richtung einer Giesserei erweitern. Was das Frachtaufkommen noch deutlich erhöhen wird. Damit der oder die Rangierer auch richtig was zu tun haben, wurde die Waggondrehscheibe geplant.
Die Faller Waggondrehscheibe ist mir zu klein. Dort passen keine langen 2-Achser mehr drauf. Also habe ich mich weiter umgeschaut. Hapo ist mir zu teuer, Heljan und Walther/Atlas zu gross. Bei Peco gibt es eine gedeckte Drehscheibe in H0m. Also habe ich diese Drehscheibe genommen und umgebaut.
Vorgehen:
- Beschaffung der Peco H0m Drehscheibe (der Preis mit über 70Franken ist eine frechheit für das bischen Plastik)
- Bau der Drehscheibe in der Gedeckten Varianten gemäss Bauanleitung.
- Enfernen sämtlicher Kleineisen für die H0m Gleise
- Lackieren (Dunkelgrau) der Grundfarbe
- Verspachteln der Löcher die zwischen den Kleineisen entstehen (Der Revelspachtel funktioniert hier sehr gut)
- Schleifen (Vorsicht mit den Nieten)
- Nachgravieren der Stahlplatten, wo sie durch den Spachtel verdeckt wurden
- Aufkleben von neuen Styrolplättchen für die Kleineisen, so dass anschliessend die Spurweite passt und auch die Gleislage symetrisch ist (das Ganze dreht ja…)
- Aufkleben der Schienen (Spurweite beachten)
- Alterung mit Pulverfarben (Pastelkreide)
Fotos:
Ich habe immer wieder nach Vorbildern gesucht, aber es ist extrem schwer, welche zu finden… Also habe ich auch hier den Freelance Prototype Weg gewählt.
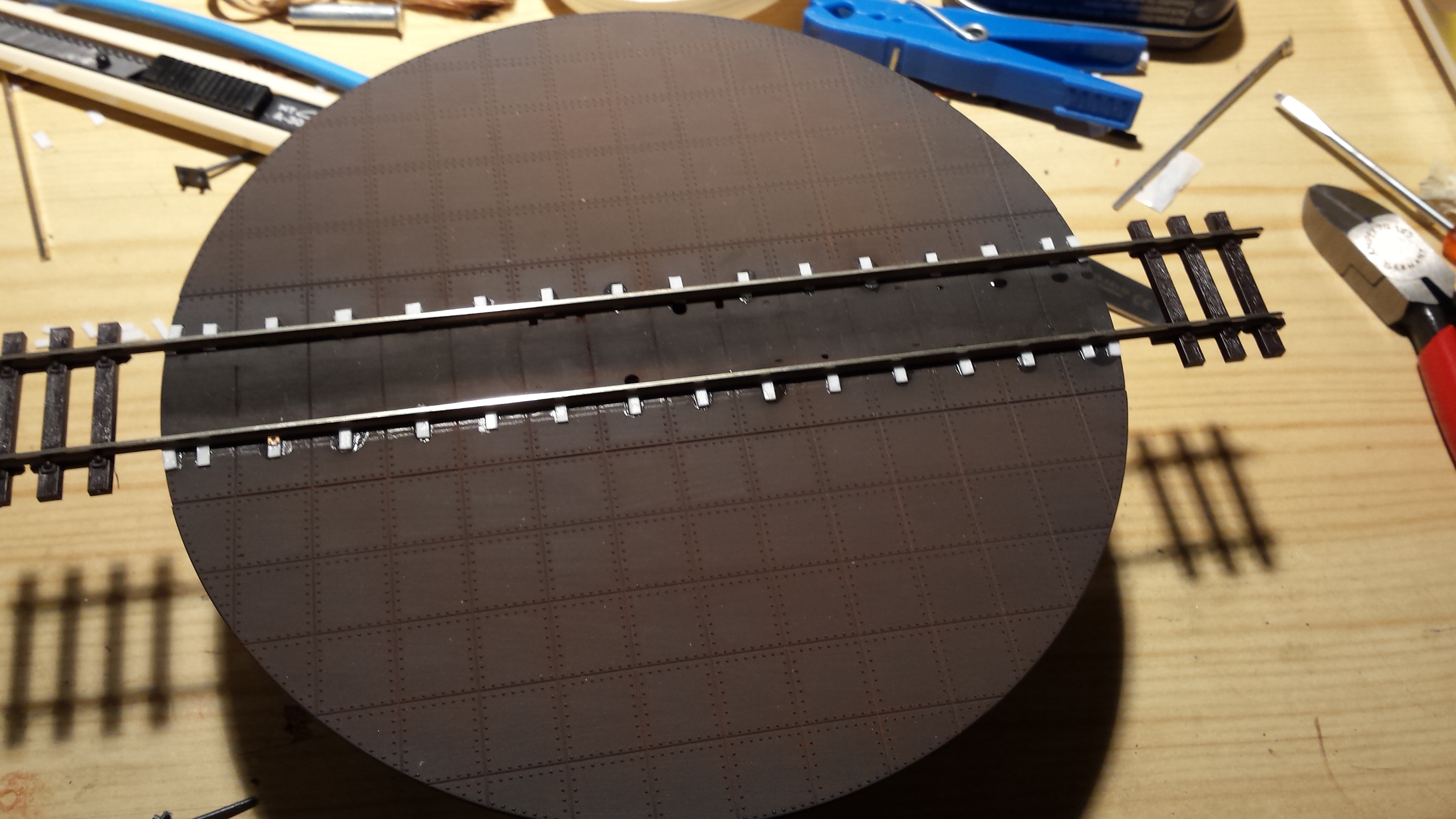
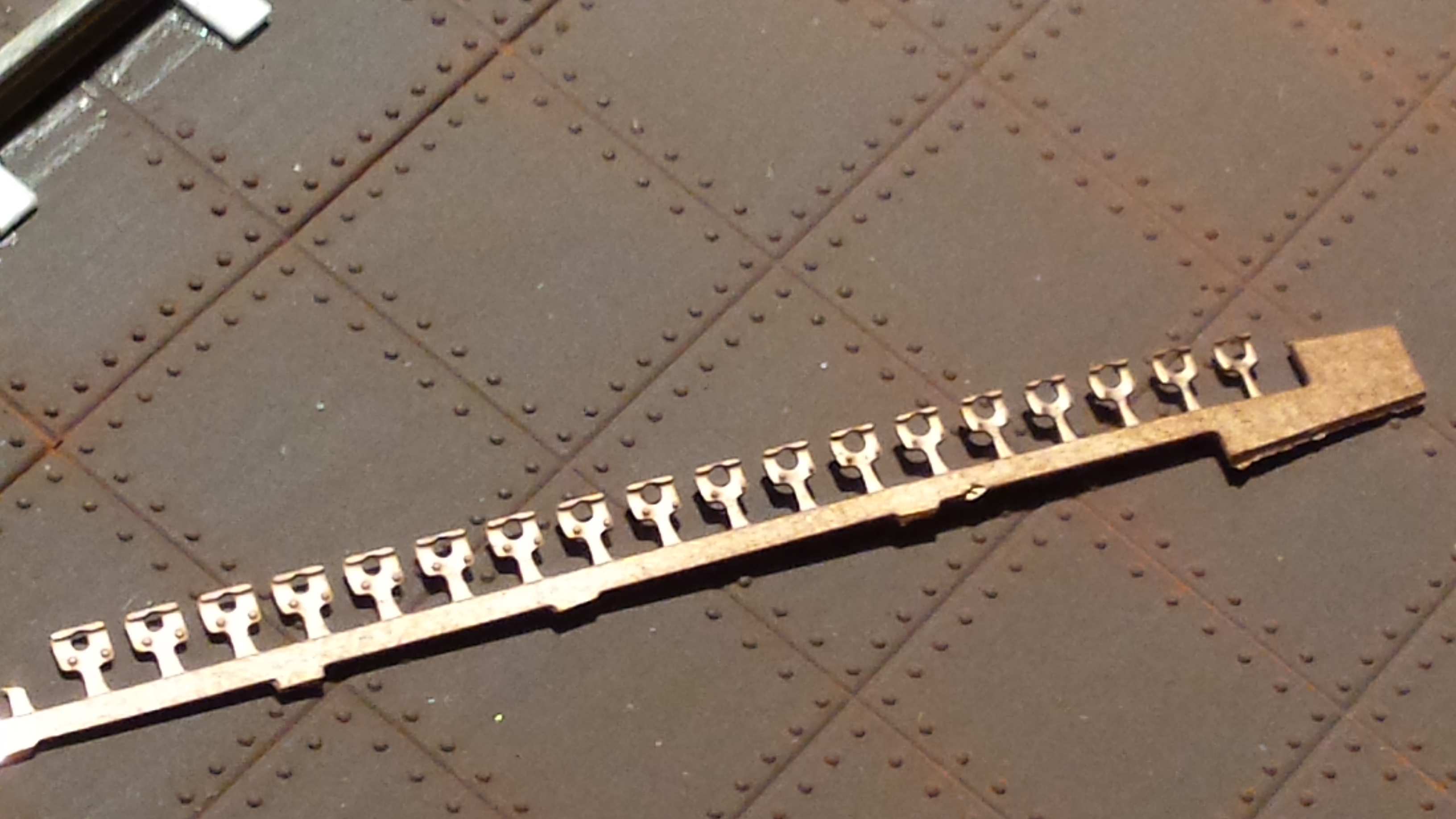
Oben mal zur Übersicht die Umgebaute Drehscheibe. Die Styrolplättchen sind asymetrisch aufgelegt. Bei meiner Drehscheibe liegt das Gleis auf Blechen, die zu eine Lasche hochgebogen sind und sind nur von einer Seite verschraubt.
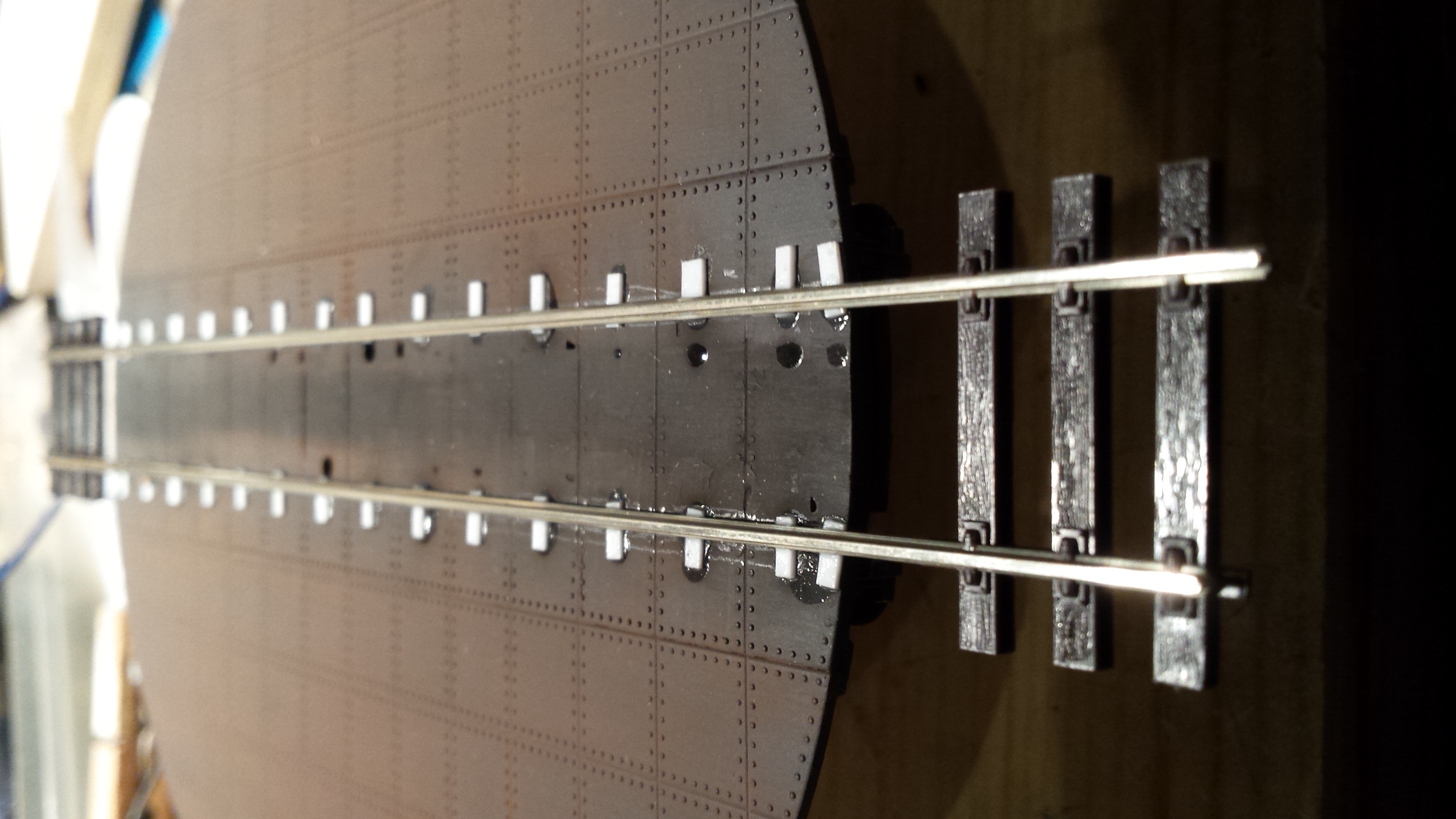
Die “Centerline” habe ich gut getroffen und auch schon mal erste dunkle Dreckspuren angebracht. Die Schienen sind noch zu lang, da ich meine Gleisbaulehren nicht gefunden habe, habe ich vom Peco Profil vorn und hinten noch 3 Schwellen dran gelassen um die Spurweite zu haben.

Die Styrolstreifen habe ich von Hand geschnitzt und bei den beiden Handbedienungen bin ich nicht sicher, ob ich die so dick lasse oder ob ich die Stangen abschneide, ausbohre und dann aus Stahldraht nachbilde.
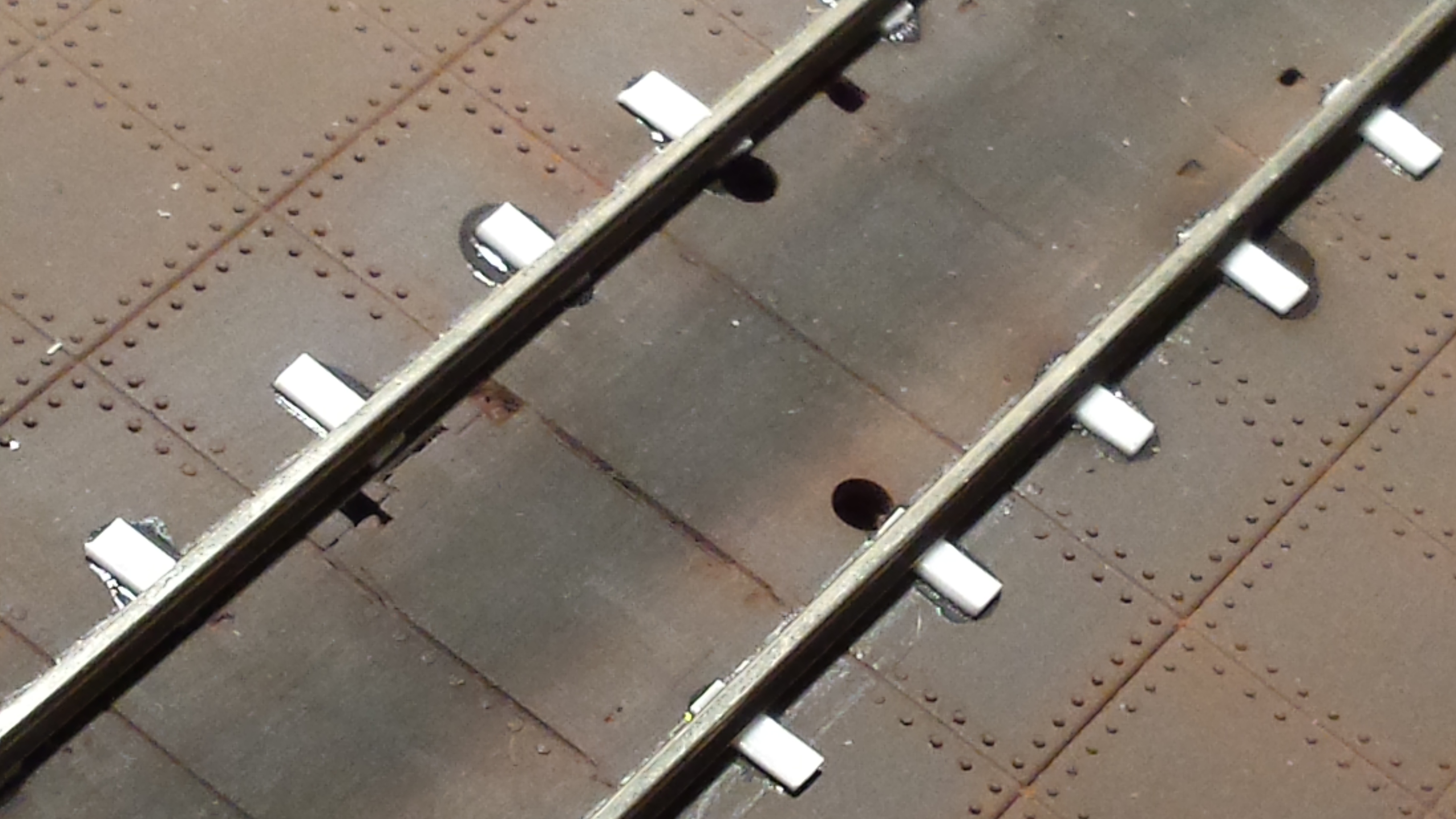
Beim Spachteln und schleifen sind in der Mitte leider die meisten Nietimmitationen auf der Strecke geblieben. Aber ich werde das mit einer Mischung etwas tarnen. Im Original wird mittig immer Öl und Fett und Sott von Loks und Wagen liegen. An den Kleineisen ebenfalls. Öl und Staub/Dreck geben so eine Pasten-ähnliche Masse die sich da entsprechen aufbaut. Ich denke, mit etwas Heilerde (ja – genau das, was Ihr jetzt denkt…) und Leim wird das nachgebildet und mit Ölfarbe (schwarzgrau) eingeschmuddelt.
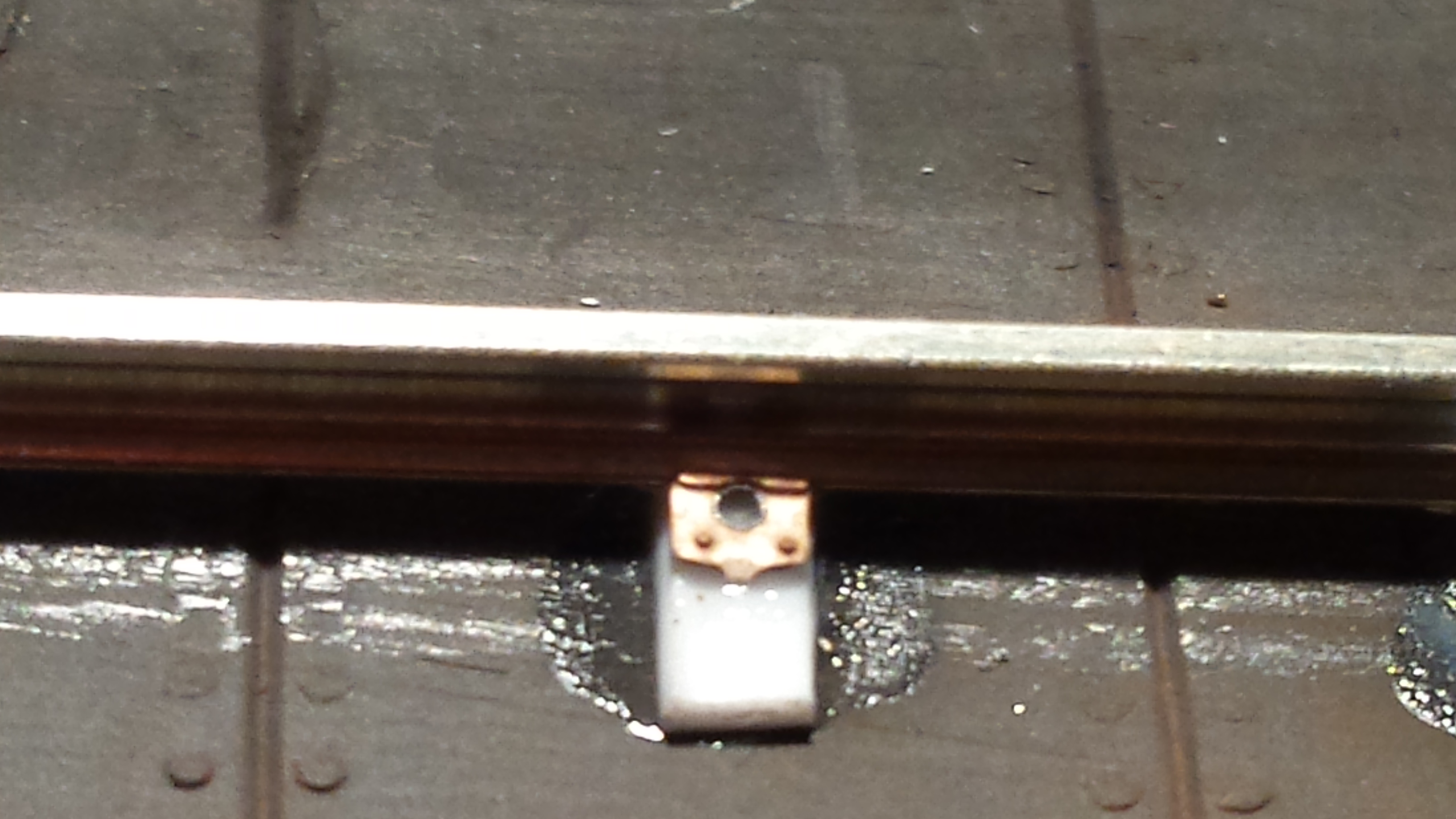
Die Kleineisen habe ich von den DKW übrig (Hobbyecke Schumacher) und mit Sekundenkleber aufgeklebt. Jetzt noch ein Loch rein und ein kleiner Pin aus Messingdraht.
Der Ring der Drehscheibe auf dem Modul wird ebenfalls entsprechend gealtert und die Gleislage muss noch auf Höhe gebracht werden. Bevor das geschieht, muss aber die Brücke und die Weiche auf dem Modul fertig werden.
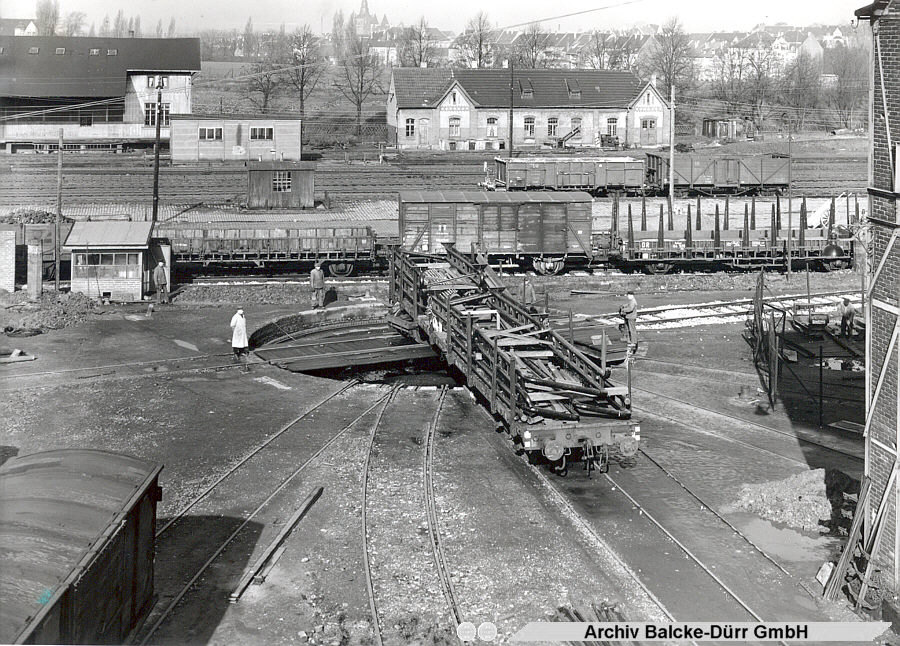
Vorbildfotos:
http://www.drehscheibe-online.de/foren/read.php?17,1411771,page=all Erstes Bild: http://img140.imageshack.us/img140/3807/htpic000465ui.jpg
Und man kann auch Drehgestellwagen über Drehscheiben verschieben…
http://www.drehscheibe-online.de/foren/read.php?17,4752509,page=all Erstes Bild: http://www.ostbahn.org/archiv/1951_03_drehscheibe_013.jpg
{kind=link}
Die Ausbeute an Vorbildfotos für gedeckte Waggondrehscheiben in Stahlbauart ist echt mager…
Antrieb:
Der Mechanische Umbau der Drehscheibe ist die eine Sache. Der Antrieb der Scheibe ist die Andere. Ich habe mir vorgenommen, die Drehscheibe mit einem Schrittmotor und einem Arduino zu motorisieren. Auf der Seite des Modulkastens wird es dazu dann einen Inkrementgeber oder Poti geben, was dazu gebraucht wird, links oder rechts herum zu fahren. Da die Drehscheibe genau 3 Abgänge bekommt, erscheint es mir ok, wenn ich die Positionen mit einer Lichtschranke oder einem Hallsensor und Magneten markiere und so anfahren kann. Aber mal schauen.
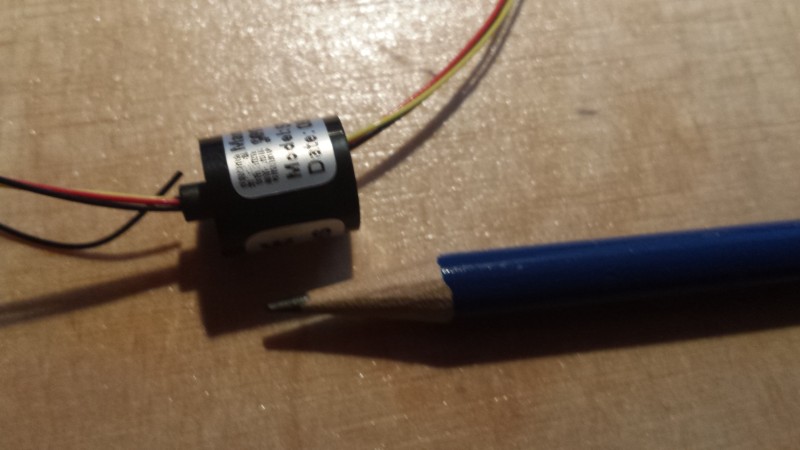
Das bisher grösste Problem für mich war es, wie ich die Kabel durch eine Achse verdrehsicher bekommen kann. Das Problem habe ich seit heute Morgen gelöst. Ich habe eine Industiellen Drehübertrager oder Schleifring gekauft. Bei mir in der Nähe sitzt die Firma LTN Precision Products GmbH ( http://www.ltn.ch/produkte/drehuebertrager/schleifringe/ ) welche solche Schleifringe für die Servotechnik anbietet. Der kleinste hat genau die Dimensionen, die ich brauche. 3 Kabel a 2A und sehr kleine Bauform. Der Preis von 48CHF war für mich noch zu verschmerzen. Den Schrittmotor habe ich aus einem toten Scanner gerettet. Wahlweise wäre auch ein Drucker ein gutes Objekt!.
Das gute Stück sieht so aus:
Wie ich jetzt den Schrittmotor und die Achse zusammenbringe, sehe ich mir dann demnächst an. Es wird wahrscheinlich ein Schneckengetriebe werden. Die Zahnräder gibt es bei Conrad.
Für die Elektronik bin ich auf eine Südafrikanische Webseite (!!) gestossen: http://trains4africa.co.za/?p=658 Dort gibt es einige interessante Anregungen. Bei den Britischen Kollegen gibt es ebenfalls einige Informationen: http://www.rmweb.co.uk/community/index.php?/topic/78578-dcc-controlled-peco-turntable-project/ Aus diesen Quellen werde ich was feines entwickeln.
Nachstrag Antrieb 13.02.2016
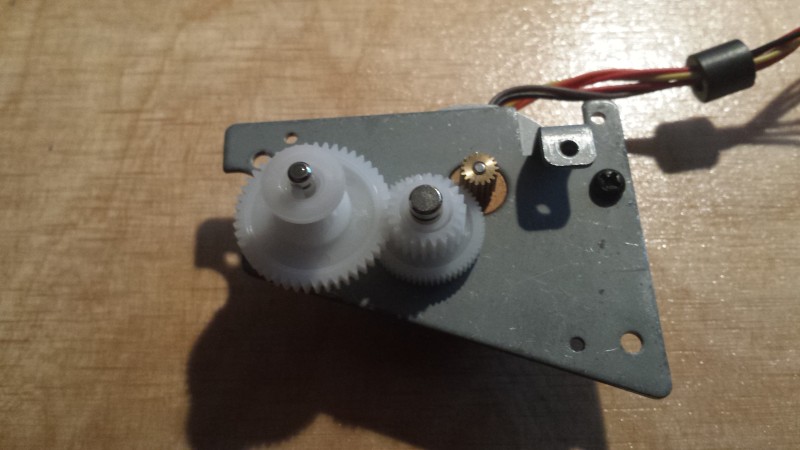
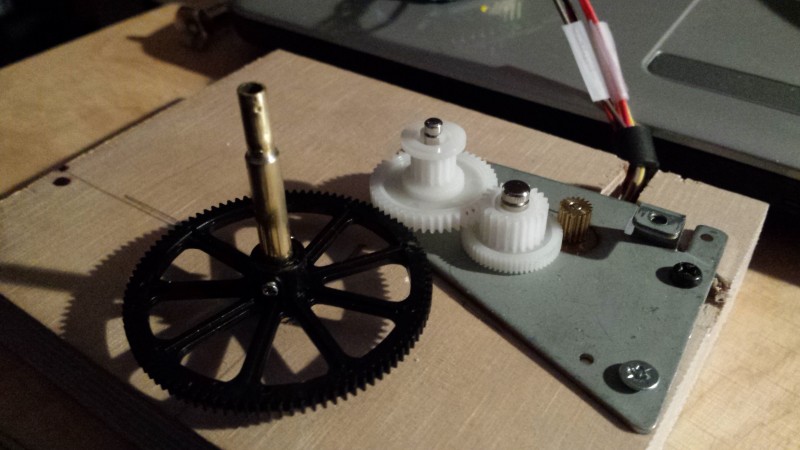
In meinem Fundus habe ich den Schrittmotor ausgegraben, den ich aus einem alten Scanner “gerettet” habe. Es ist ein unipolarer Schrittmotor mit 6 Kabeln. Ich habe etwas gebraucht, bis ich herausgefunden habe, was ich als Motor zur Verfügung habe. Zur Sicherheit habe ich auch noch einen alten CDROM Brenner ausgenommen und die beiden Mechaniken für die Schublade und den Sensorkopf “gerettet”. Ich will ja auch noch einen Wagenkipper bauen und da brauche ich noch einen Motor…
Der Drehscheibenmotor sieht so aus:
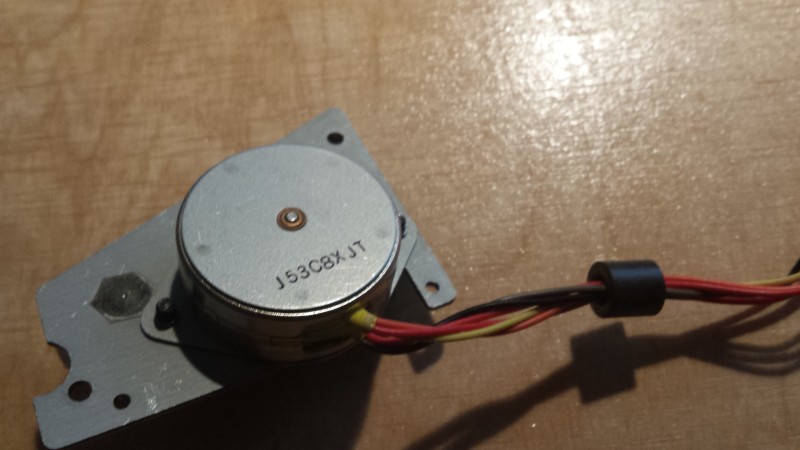
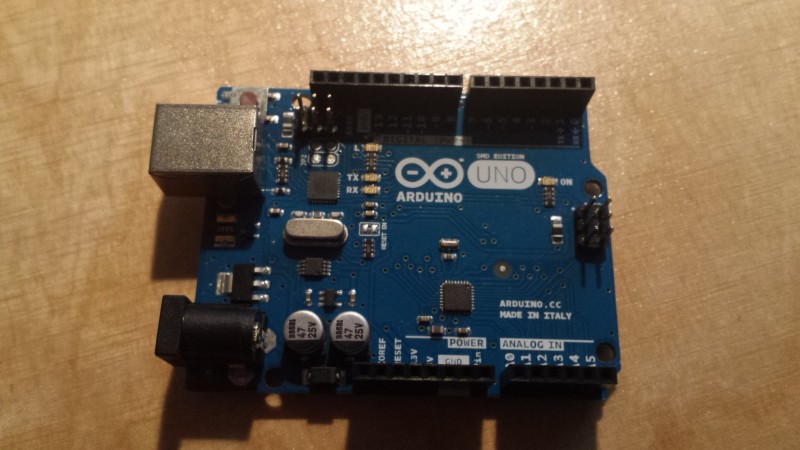
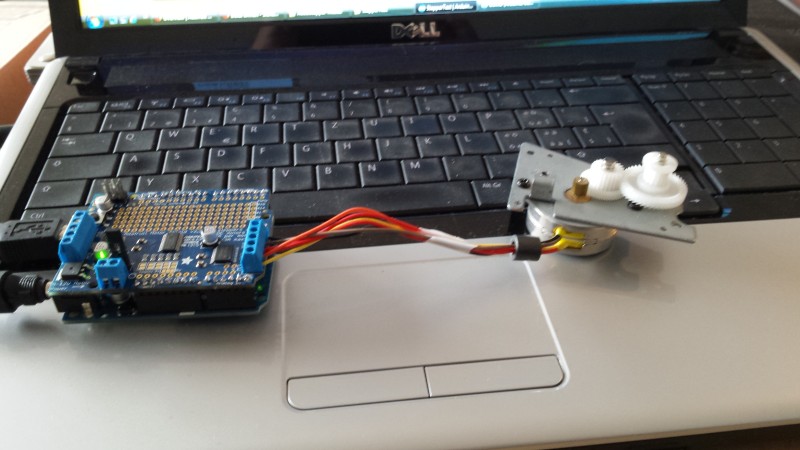
Bei dem lokalen RC E-Flieger Händler im Nachbardorf habe ich gesehen, dass die für Helis grosse Zahnräder haben, die auf eine 5mm Welle passen und bei dem das Zahnradmodul passen hierzu aussieht. Zusammen mit dem Drehübertrager und dem Getriebemotor und einem Arduino UNO habe ich den Mechatronischen Teil beisammen. Es fehlt nur noch ein Leistungstreiber wie den ULN2003 oder ULN2803. Ich muss nächste Woche mal bei Conrad vorbei und schauen, ob die was passendes da haben.
Als Ansteuerung werde ich entweder einen Inkrementalgeber oder einen kleinen Joystick verwenden. Die Idee dazu habe ich aus den folgenden beiden Tutorials:
https://brainy-bits.com/tutorials/stepper-motor-rotary-encoder-p1/ (Inkrementalgeber)
https://brainy-bits.com/tutorials/stepper-motor-easy-driver/ (Joystick)
Brainy-bits setzt auf Standart-Libraries für den Arduino auf und der Code ist gut kommentiert, wenn auch für NEMA 17 Motoren. Ich habe keinen Schimmer, was mein Motor kann. Aber wir werden sehen.
Montag gehe ich mit dem Motor zum E-Fliger Händer und probiere Ritzel aus.
Nachtrag 23.02.2016
Wenn man einen Stepper Motor “gerettet” hat und keinerlei Infomation über den Motor findet, muss man zum Reengineering greifen und den Motor ausmessen. Bei mir gibt es folgende Kabelfarben: Rot1, Rot2, Orange, Braun, Gelb, Schwarz – Es sind also 6 Kabel – das deutet klar auf einen unipolaren Schrittmotor hin. Mit eine Multimeter misst man den Wiederstand der Motorspulen.
| Rot1 | Rot2 | Orange | Braun | Gelb | Schwarz | |
| Rot1 | X | X | 270 | X | 270 | X |
| Rot2 | X | X | X | 27.0 | X | 27.0 |
| Orange | 27.0 | X | X | X | 54.0 | X |
| Braun | X | 27.0 | X | X | X | 54.0 |
| Gelb | 27.0 | X | 54.0 | X | X | X |
| Schwarz | X | 27.0 | X | 54.0 | X | X |
Mit den Messergebnissen kann man folgendes Schema zeichnen.
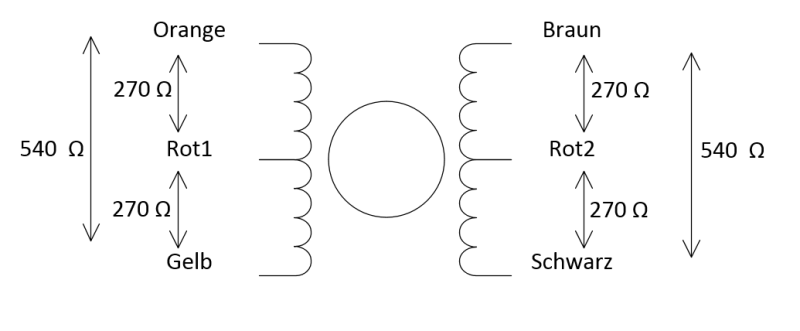
Wie man darauf kommt, findet man hier: http://www.jasonbabcock.com/computing/breadboard/unipolar/index.html
Ich verwende den Adafruit Motorshield V2.3 – Ja, man hätte es auch billiger machen können, aber bei Adafruit findet man gut gemachte Tutorials, wie dieses hier: https://learn.adafruit.com/adafruit-motor-shield-v2-for-arduino/using-stepper-motors das hilft mir mehr als wenn ich Tage lang nach einem passenden Beispiel suchen muss.
Mit Hilfe des StepperTest.ino Sketches kann man schnell und einfach den Motor durchtesten. Im Moment “glaube” ich, dass es ein 12V Motor ist, der 8 Grad Schrittweite hat. Also habe ich die entsprechenden Zeilen im StepperTest Sketch angepasst.
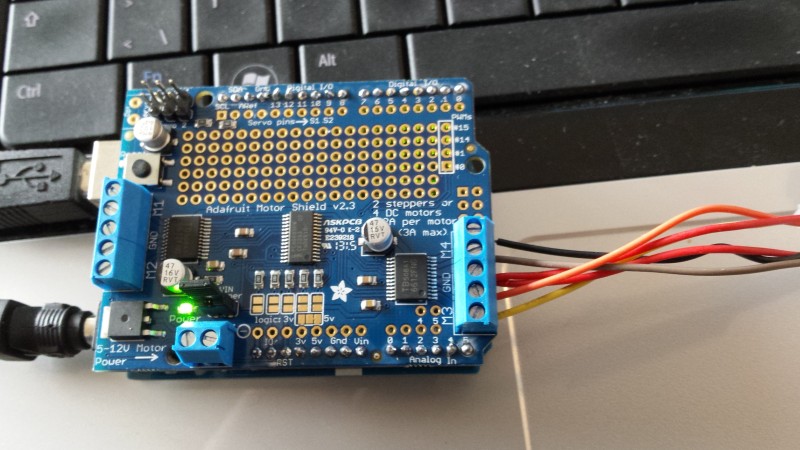
Der Motor wird and M3 und M4 angeschlossen (Ausgang 2) und die 5 (!!) Klemmen werden wie folgt belegt:
M3: Gelb, Orange
GND: Rot1 + Rot2 in der gleichen Klemme
M4: Braun, Schwarz
Damit der Motor auch genug Strom bekommt, habe ich 12V in die Stromversorgung vom Arduino gesteckt und den Jumper gesetzt. Damit läuft der Motor eigentlich recht rund. Sollte der Motor “rattern”, sind die Kabel bei Eurem Motor anders belegt und Ihr müsst testen. Wenn nur 4 Kabel da sind, handelt es sich um einen bipolaren Schrittmotor.
Als nächstes werde ich versuchen, einen Sketch zu entwickeln, der die Joysticks verwendet, um die Drehscheibe zu steuern. Danach versuche ich den Physikalischen Aufbau der Drehscheibe zu bewerkstelligen und das Ganze im Modul zu integrieren. Dann fehlt nur noch der Frog Jucifier und ich bin fertig.
Nachtrag 25.02.2016
Der Aufbau erfolgt auf einem Stück 25mm dicken Multiplex. Das hat den Vorteil, dass ich es mit einer recht grossen Klebefläche am Modul befestigen kann und ich neben dem Motor auch den Arduino darauf fixieren kann. Die Achse werden Durchstossen lassen und unten einfach den Schleifring für die Kabel dran machen. Mal sehen. In der Achse sicherlich geklebt aber sonst eher mit einer Schelle fixiert. Eigentlich will ich das Demontierbar gestallten… .
Mit dem Test Sketch von Adafruit bin ich bei 10 Umdrehungen und Single Stepping schon fast zu schnell. Bei Half Stepping geht es schon recht gut und ganz fein bei Micro Stepping.
Stand der Technik heute Abend.
Weitere Infos:
http://www.8051projects.net/wiki/Stepper_Motor_Tutorial
http://nerdclub-uk.blogspot.de/2011/08/driving-stepper-motor-directly-from-pic.html
LG,
Axel